
步進電機是將電脈沖信號轉變為角位移或線位移的開環控制元件。在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響,即給電機加一個脈沖信號,電機則轉過一個步距角。這一線性關系的存在,加上步進電機只有周期性的誤差而無累積誤差等特點。使得在速度、位置等控制領域用步進電機來控制變的非常的簡單。
一、步進電機的構造(以5相步進為例)
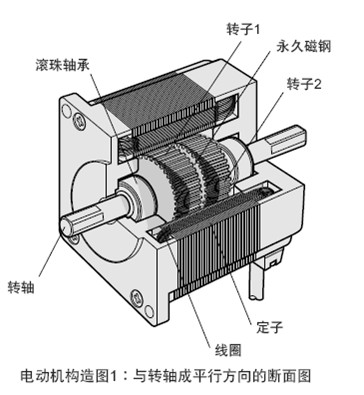
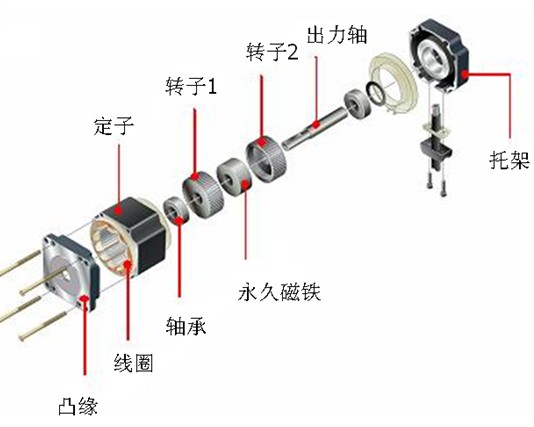
步進電機的構造主要采用圖示的方式進行講解:
步進電動機構造上大致分為定子與轉子兩部分。 轉子由轉子 1、轉子 2、磁鋼等 3 部分構成。而且轉子朝軸方向已經磁化,轉子 1 為 N 極時,轉子 2 則為 S 極。
定子擁有小齒狀的磁極,共有 10個,皆繞有線圈。 其線圈的對角位置的磁極相互連接著,電流流通后,線圈即會被磁 化成同一極性。(例如某一線圈經由電流的流通后,對角線的磁極將 同化成 S 極或 N 極。) 對角線的 2個磁極形成 1個相,而由于有 A相至 E相等 5個相位,因此稱為 5 相步進電動機。
系統構成圖示
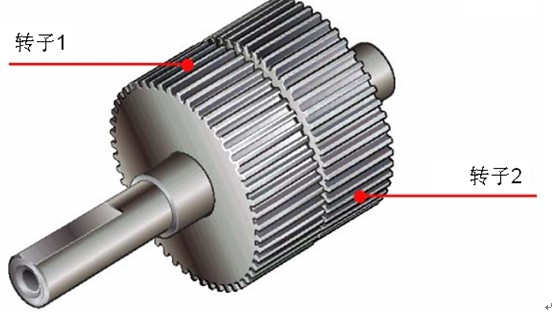
轉子的外圈由 50個小齒構成,轉子 1 和轉子 2 的小齒于構造上互 相錯開 1/2 螺距。由此轉子形成了100個小齒。目前已經有轉子單個加工至100齒的高分辨率型,那么高分辨率型的轉子就有200個小齒。因此其機械上就可以實現普通步進電機半步(普通步進電機半步需要電氣細分達到)的分辨率。
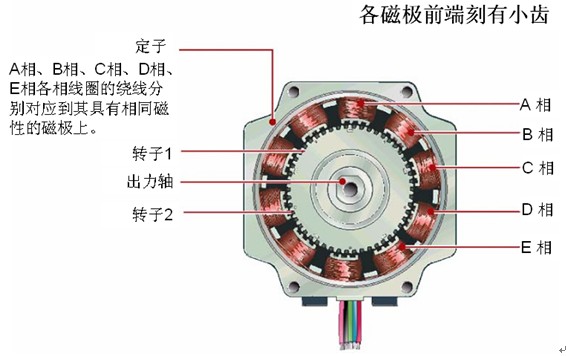
電動機構造圖2∶與轉軸成垂直方向的斷面圖
二、步進電機的運轉原理。
實際上經過磁化后的轉子及定子的小齒的位置關系,在此說明如下。 首先解釋勵磁,勵磁就是指電動機線圈通電時的狀態。
● A相勵磁
將 A 相勵磁,會使得磁極磁化成 S 極,而其將與帶有 N極磁性的 轉子 1 的小齒互相吸引,并與帶有S極磁性的轉子 2 的小齒相斥, 于平衡后停止。此時,沒有勵磁的 B相磁極的小齒和帶有 S極磁性 的轉子 2 的小齒互相偏離 0.72°。以上是 A 相勵磁時的定子和轉子小齒的位置關系。
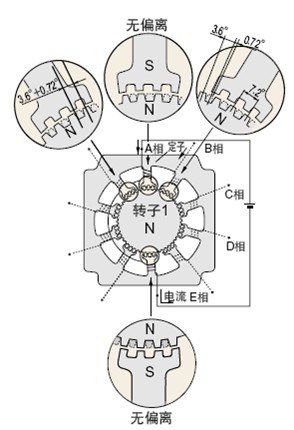
● B相勵磁
其次由 A 相勵磁轉為 B 相勵磁時,B 相磁極磁化成 N 極,與擁有 S極磁性的轉子 2 互相吸引,而與擁有 N極磁性的轉子 1 相斥。
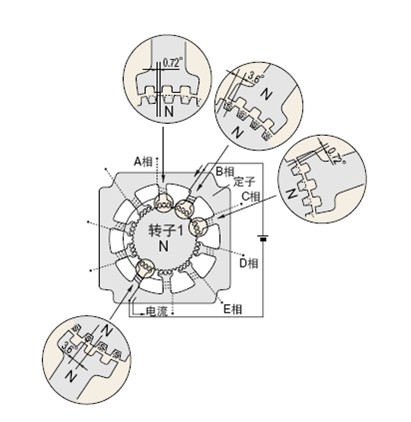
也就是說,從 A 相勵磁轉換至 B 相勵磁時,轉子轉動 0.72°。由此可知, 勵磁相位隨 A相→ B相→ C相→ D相→ E相→ A相依次轉換,則步進電動機以每次 0.72°做正確的轉動。同樣的,希望作反方向轉動時,只需將勵磁順序倒轉,依照 A相→ E相→ D相→ C相→ B相→ A相勵磁即可。
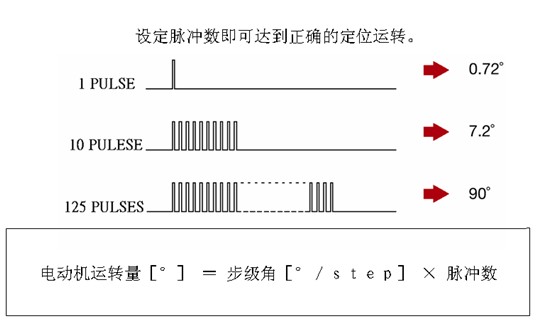
0.72°的高分辨率,是取決于定子和轉子構造上的機械偏移量,所以不需要編碼器等傳感器即可正確的定位。下圖就5相步進每次的位移量是0.72°進行更詳細的說明:
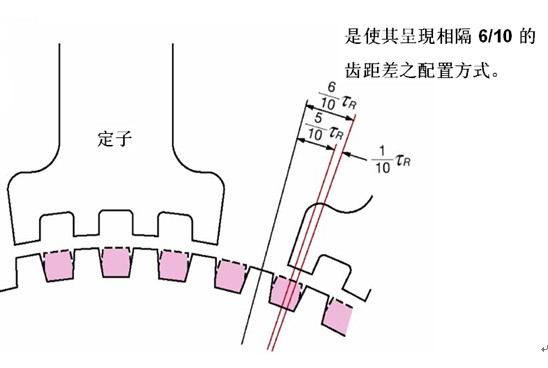
由于組定子正好與轉子相對應吸引。就勢必會導致第二組定子與對應的轉子相偏離(定子與轉子齒距一樣,但是各自所在的2個圓不一樣大)。而這個偏離值正好是齒距的十分之一。因此普通5相步進的步距角為:360°/50齒/10=0.72°
高分辨率5相步進的步距角為:360°/100齒/10=0.36°
另外,就停止精度而言, 會影響的只有定子與轉子的加工精度、組裝精度、及線圈的直流電阻的不同等而已,因此可獲得 ±3 分(無負載時)的高停止精度。 實際上步進電動機是由驅動器來進行勵磁相的轉換,而勵磁相的轉換時機則是由輸入驅動器的脈沖信號所進行。以上舉的是 1相位勵磁的例子,實際運轉時,為有效利用線圈同時進行 4相或 5相勵磁的。
三、步進電動機的特征
1、運轉需要的三要素:控制器、驅動器、步進電動機
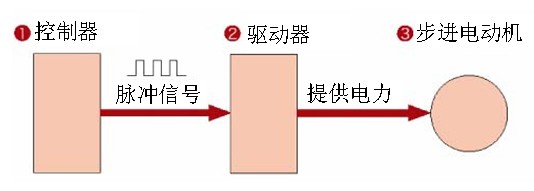
以上三部分是步進電機運轉*的三部分。控制器又叫脈沖產生器,目前主要有PLC、單片機、運動板卡等等。
2、運轉量與脈沖數的比例關系
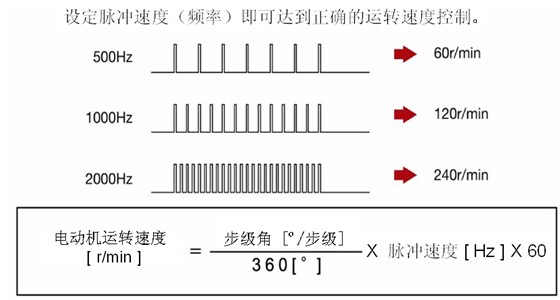
3、運轉速度與脈沖速度的比例關系
4、本身具有保持力
步進電機只有在通電狀況下,才具備自我保持力。在停電狀況下 ,自我保持力消失。
因此在升降設備傳動時,務必使用附電磁剎車型步進電機。
四、結束語
雖然步進電機已被廣泛地應用,但步進電機并不能像普通的直流電機,交流電機在常規下就能使用。它必須由脈沖信號、功率驅動電路等組成控制系統方可使用。因此用好步進電機卻非易事,它涉及到機械、電機、電子及計算機等許多專業知識。但是萬丈高樓平地起,從步進電機的基礎開始學習,無疑為將來的應用打好扎實的基礎。
 聯系QQ:706874393
聯系QQ:706874393 聯系郵箱:706874393@qq.com
聯系郵箱:706874393@qq.com 傳真:0851-4403093
傳真:0851-4403093 聯系地址:貴陽市觀山湖區金陽西南商貿城
聯系地址:貴陽市觀山湖區金陽西南商貿城
掃一掃 微信咨詢
©2024 貴州鑫高儀器有限公司 版權所有 備案號:黔ICP備20005073號-1
技術支持:化工儀器網 GoogleSitemap 總訪問量:519580 管理登陸
